7.2 使用UART实现系统间通讯¶
我们在前一节中已深入了解异步串行通讯接口及UART等细节,本节将了解如何使用通讯端口实现嵌入式系统之间的通讯。仍从一个示例开始, 该示例的目标是使用多个BlueFi开源板玩一种“数字接龙游戏”。多人玩这种数字游戏时,某个人首先说一个数字,与他相邻的人说加一后的数字,如此加一传递数字, 一轮又一轮地将数字传递下去。实现这个有趣的游戏之前,我们需要稍微了解其背后的原理。
BlueFi开源板40脚金手指拓展接口的P0和P1引脚分别可作为异步串行通讯的RxD(串行数据输入)和TxD(串行数据输出), 使用鳄鱼夹电线将这两个引脚交叉连接可以实现两个BlueFi之间的串口通讯,如图7.9所示。

图7.9 两个BlueFi使用串口通讯的连接方法
注意,两个嵌入式系统之间使用串口通讯,两个系统必须共地,即两个BlueFi的GND信号必须连接在一起。此外,所谓交叉连接指的是, 一个BlueFi的TxD引脚与另一个BlueFi的RxD引脚连接。
我们想要实现的数字接龙游戏的准备工作包括,首先使用多根鳄鱼夹电线将所有BlueFi开源板的金手指拓展接口GND引脚连接起来, 然后再使用鳄鱼夹电线将第1个BlueFi的P1引脚与第2个BlueFi的P0引脚连接,第2个BlueFi的P1引脚与第3个BlueFi的P0引脚连接,.., 最后一个BlueFi的P1引脚与第1个BlueFi的P0引脚连接,即多个BlueFi的P0和P1引脚环形级联起来。如图7.10所示。

图7.10 多个BlueFi使用串口通讯的连接方法
虽然上图仅有3个BlueFi开源板的级联,事实上任意多个BlueFi都是可以用这种方法呈环形级联的。根据这个连接方法,或许你已经明白多个BlueFi实现数字接龙的“数字传递”过程了。 第1个BlueFi将数字(通过TxD引脚)传递给第2个BlueFi(从RxD引脚接收到该数字),第2个BlueFi将收到的数字加一后(通过TxD引脚)传递给第3个BlueFi(从RxD引脚接收到该数字), ..,最后一个BlueFi将收到的数字加一后(通过TxD引脚)传递给第1个BlueFi(从RxD引脚接收到该数字),第1个BlueFi将收到的数字加一后再传递给第2个,如此循环传递即可实现这个游戏。
实现该游戏的程序代码如下:
(uart_digit_chain_game.ino)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 | #include <BlueFi.h>
const String hintStr = "press Button A to send";
const String recStr = "Received:";
bool startSend = false;
void a_pressed_cb(Button2& btn) { // callback function to A-Button be pressed
Serial.println(" A-Button be pressed");
startSend = true; // send a message to main-loop
}
void setup() {
bluefi.begin(); // include Serial.begin(115200)
initialScreen(); // show initial content on the screen
bluefi.aButton.setPressedHandler(a_pressed_cb); // register a callback function
Serial1.begin(9600); // P0(RxD) and P1(TxD) are Serial1 signals
}
void loop() {
bluefi.aButton.loop(); // update the state of A-button
if (Serial1.available() > 0) { // if a digit be received
int comingIn = Serial1.read();
uint8_t val = (uint8_t)comingIn;
updateScreen(val); // update LCD screen
Serial1.write(val+1); // increment this digit and send to next BlueFi
delay(200);
}
if ( startSend ) { // if A-Button be pressed, then start send
startSend = false;
uint8_t startDigit = 0;
Serial1.write(startDigit); // send the initial digit
}
delay(50);
}
void initialScreen(void) {
bluefi.Lcd.fillScreen(TFT_BLACK); // clear screen
bluefi.Lcd.setTextColor(TFT_WHITE, TFT_BLACK);
bluefi.Lcd.setCursor(20, 0, 4);
bluefi.Lcd.println( "Digit Chain Game");
bluefi.Lcd.setCursor(4, 40, 4);
bluefi.Lcd.println("with UART (P1-->P0)");
bluefi.Lcd.setCursor(0, 150, 2);
bluefi.Lcd.println(hintStr); // show hint
}
void updateScreen(uint8_t val) {
static bool first = true; // a static variable is equal to a global variable
static String digitStr = "";
if (first) {
bluefi.Lcd.setTextColor(TFT_BLACK, TFT_BLACK);
bluefi.Lcd.setCursor(0, 150, 2);
bluefi.Lcd.println(hintStr); // erase hint
bluefi.Lcd.setTextColor(TFT_RED, TFT_BLACK);
bluefi.Lcd.setCursor(20, 100, 4);
bluefi.Lcd.println(recStr); // show "Received:"
first = false; // this code block to execute only once!
}
bluefi.Lcd.setTextColor(TFT_BLACK, TFT_BLACK);
bluefi.Lcd.setCursor(140, 100, 4);
bluefi.Lcd.println(digitStr); // erase the last digit string
bluefi.Lcd.setTextColor(TFT_YELLOW, TFT_BLACK);
digitStr = String(val);
bluefi.Lcd.setCursor(140, 100, 4);
bluefi.Lcd.println(digitStr); // show this digit string
}
|
上面示例程序看起来代码行较多,如果暂时不考虑最后的两个函数initialScreen()和updateScreen(),实现数字接龙游戏的关键代码是初始化函数setup()中的最后一行代码, 即Serial1.begin(9600),以及主循环函数loop()中的代码。其中Serial1.begin(9600)用来初始化BlueFi金手指拓展接口的P0和P1两引脚分别为Serial1的RxD和TxD信号, 波特率为9600;主循环中的第一个if程序块以Serial1.available()接口的返回值是否大于0为条件,该接口返回值大于0则意味着Serial1接收到数据, 在这个if程序块中首先从接收缓冲区读取一个接收到的数据并转换为8位无符号整数,然后调用子程序updateScreen()更新LCD显示器,然后将该数值加一后再发送出去。
该示例程序的大多数代码都是用于控制LCD显示器。在initialScreen()函数中将LCD显示器清屏,然后显示初始的文本内容。在updateScreen()函数中, 如果首次执行LCD屏幕刷新则需要将初始化时屏幕上的提示信息擦掉,更新接收到的数值到LCD显示屏上(仍然是先擦掉再显示新的数值)。
此外,示例程序还用到按钮A来启动游戏。BlueFi的按钮控制软件的接口详见第4.1节。本示例的初始化期间为按钮A注册一个“A按钮被按下时”的回调函数, 当A按钮按下时向主循环发送一个消息(一个全局变量startSend=true)。在主循环程序中,调用bluefi.aButton.loop()接口检查按钮A的事件, 并检查是否收到A按钮被按下的回调函数发出的消息,如果收到则通过Serial1发出一个数字。
将上面的程序代码复制-粘贴到Arduino IDE中,编译并逐个地下载到已经连接好的所有BlueFi开源板上。注意,这个示例程序并不依赖电脑USB端口,当程序下载到BlueFi之后, 可以使用任何USB电源给BlueFi开源板供电。当所有BlueFi开源板通上电且按图7.10的示例环形级联好之后,并没有启动游戏,当你按下任一BlueFi开源板的按钮A之后才能启动游戏。
如果你觉得使用Arduino IDE编译和下载程序所耗费的时间太长,可以使用Python脚本程序来实现该游戏。使用Python之前,你必须使用USB数据线将BlueFi与电脑连接好, 并双击复位按钮让BlueFi进入Bootloader状态,将BlueFi的最新版Python解释器固件拖放到BLUEFIBOOT磁盘,等待CIRCUITPY磁盘出现在电脑资源管理器中, 再将下面的Python脚本程序保存到/CIRCUITPY/code.py文件,即可。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 | import time # time moudle
import board, busio # board and busio modules
from hiibot_bluefi.basedio import Button # Button module
btn = Button()
# Initialize UART port:
uart = busio.UART(
board.P1, board.P0, baudrate=9600, # two Pins(TxD, RxD)
timeout=0.01, receiver_buffer_size=1) # waiting time(s), size of buffer
outBuf = bytearray(1) # out buffer, uart.write(bytearray,num)
print("Press A button to start game")
while True:
btn.Update()
if btn.A_wasPressed : # start our game, send a digit
outBuf[0] = 0 # any digit: 0~255
uart.write(outBuf, 1)
print("Go it!")
inBuf = uart.read(1) # return a bytearray type
if inBuf != b'' : # is not None
print(int(inBuf[0]))
outBuf[0] = (inBuf[0]+1)%256
uart.write(outBuf, 1)
time.sleep(0.3)
|
为啥这个游戏的Python脚本程序很短呢?少了刷新LCD显示屏的代码,因为Python解释器将BlueFi的LCD显示当作字符控制台, 我们需要显示的信息直接用print(info)即可输出到屏幕上,而且自动滚屏显示。
现在可以仔细地测试本示例并观察数字接龙的效果。如果没有观察到连续的数字接龙效果,请首先检查环形级联的连线、共地连线、供电等硬件连接是否可靠牢固; 然后检查鳄鱼夹是否与P0、P1、GND附近的引脚连接上,波特率参数是否一致。
如果你的硬件连线很牢固,上面的数字接龙游戏几乎可以无穷无尽地执行!我们观察到的接龙数字应该是“.., 254, 255, 0, 1, .., 127, 128, .., 255, 0, 1, ..”, 为什么接龙数字被限制在0~255范围呢?Python脚本程序的第20行语句回答这个问题。虽然C程序中并没有明显的判断接收到的数据是否小于255等语句, 但我们使用8位无符号整数作为接收和发送的数据类型,这种类型数据的有效值是多少呢?
现在可以将波特率参数修改为1200、4800、115200或921600等,再试一试。随着波特率的增加,或许我们的数字接龙会失败,包括数字不连续、游戏停止等现象。 为什么提高波特率会产生这样的效果呢?根据前一节的内容即可回答这个问题。
通过前面的示例已了解异步串行通讯的便捷性和可靠性,初步了解异步串行通讯软件的基本接口和工作流程。在工作流程方面,必须先初始化所用的异步串行端口, 调用write()接口即可发送数据,调用read()从接收缓冲区读取数据。异步串行通讯接口的软件到底有哪些接口呢?
在Arduino开源平台,Serial接口是所有兼容Arduino平台的开源板内置的 [1]_ 。标准的Arduino Serial类接口包括:
- Serial/Serial1/Serial2 异步串行通讯端口名,根据开源板MCU所支持的UART端口个数确定,BlueFi支持2个串口,即Serial和Serial1两个,其中Serial用于USB-UART桥接。上面示例中使用Serial1
- begin(bps)/begin(bps, onf) 配置接口,指定波特率(bps),以及数据位个数、奇偶校验位、停止位个数等。bps的有效值包括1200、2400、4800、9600、19200、115200等,有效的配置参数取值包括SERIAL_8N1、SERIAL_8E1、SERIAL_8O1等。不指定配置参数时,默认取值为SERIAL_8N1,即8个数据位、无校验位、1个停止位
- end() 禁止串口,释放串口资源,尤其TxD和RxD两个引脚可用作其他功能接口
- available() 串口接收缓冲区中可读的字节个数,调用read()前使用该接口查询可读的数据个数
- availableForWrite() 串口发送缓冲区中可写的字节个数,调用write()前使用该接口查询可写的数据个数以避免write()操作的阻塞时间
- read() 从串口接收缓冲区读取一个字节数据。请注意,read()接口的返回值类型是int16_t型,而非char或uin8_t等类型。当读取失败时,该接口返回值为-1
- write(val)/write(str)/write(buf, len) 向串口缓冲区写入一个单字节的数值/字符串(String型)/数组和长度,返回值是写成功的字节个数
- print(val,format)/print(str) 从串口输出数值(或按指定格式输出)/字符串,该接口与write()接口具有较大区别,print(val)首先将val转换为ASCII再发送,write(val)则直接发送原始val的8个二进制位
- println(val,format)/println(str) 先执行print()接口然后发送“rn”两个字符。’r’,即回车字符,ASCII值为0x0D;’n’,即换行符,ASCII值为0x0A
- flush() 等待串口发送缓冲区的数据发送完毕。无返回值,该接口是阻塞型的
- find(target)/find(target, len) 从串口接收缓冲区查找目标数据/(指定长度的)数据子串,返回值为true则表示已找到目标数据,否则未找到
- findUntil(target, terminal) 从串口接收缓冲区查找目标数据和终止符,返回值为true则表示已经找到目标数据和终止符,否则未找到
- setTimeout(timeMS) 设置数据接收的等待时间(ms为单位),timeMS是uint32_t型
- parseInt()/parseInt(lookahead)/parseInt(lookahead, skip)/ 从串口接收缓冲区中解析下一个有效的整数,返回值类型为int32_t。其中lookahead和skip是指定忽略的整数
- parseFloat()/parseFloat(lookahead)/parseFloat(lookahead,skip) ,充串口缓冲区中解析下一个有效的浮点数
- peek() 查看串口缓冲区中的下一个待读的数据,返回值为-1(如果缓冲区为空)或一个字节数据。注意,peek()与read()的返回值是相同的,但调用read()接口读取一个数据后,该数据则从接收缓冲区移除,peek()接口则不会移除
- readBytes(buf, len) 从串口接收缓冲区读取len个数据到数组buf中,返回值为实际读取的数据个数(不大于len)
- readBytesUntil(character, buf, len) 从串口接收缓冲区读取len个数据到数组buf中,如果遇到指定的字符character则停止读,返回值为实际读取的数据个数(不大于len)
- readString() 以字符串形式读取串口接收缓冲区中的数据,返回值为一个字符串(String型),如果接收缓冲区为空则返回空字符串
- readStringUntil(terminator) 以字符串形式读取串口接收缓冲区中的数据,遇到指定终止符时立即返回,返回值为一个字符串(String型),如果接收缓冲区为空则返回空字符串
- serialEvent() 串口事件的回调函数,当available()不小于1时被自动调用,在这个回调函数内调用read()读取数据
BlueFi开源板的Python解释器的异步串行接口是“busio”的子类,名叫UART。使用USB数据线将BlueFi与电脑连接,并打开MU编辑器,点击“串口”打开字符控制台, 将鼠标点击字符控制台区,按下“ctrol+c”键终止当前正在执行的脚本程序,强制让BlueFi解释器进入REPL状态,在“>>>”提示符后输入以下程序语句, 即可查询到“busio.UART”子类的接口:
1 2 3 4 5 | >>> import busio
>>> dir(busio.UART)
['__class__', '__enter__', '__exit__', '__name__', 'Parity', 'baudrate', 'deinit',
'in_waiting', 'read', 'readinto', 'readline', 'reset_input_buffer', 'timeout', 'write']
>>>
|
REPL执行“dir(class_name)”命令时,采用列表的形式将名为“class_name”类/模块所有的接口列举出来。 BlueFi开源板的Python解释器的“busio.UART”子类接口中,baudrate、in_waiting、timeout是接口的三种属性,分别返回当前所用的波特率、 接收缓冲区中可读的数据字节数、当前所用的超时参数(以秒为单位的浮点数);Parity是UART的子类,定义UART接口的奇偶校验类型,仅有两个有效值: busio.UART.Parity.ODD和busio.UART.Parity.EVEN;其他都是接口函数,简要说明如下:
- UART(tx: board.Px, rx: board.Px, baudrate = 9600, bits = 8, parity = None, stop = 1, timeout = 1.0, receiver_buffer_size = 64) , UART类实例化接口,除了两个引脚之外,其他配置参数均有缺省值,未指定的参数采用缺省值
- deinit(), 禁用UART并释放该硬件单元的资源,尤其引脚资源可以做其他I/O使用
- read()/read(num) , 从串口接收缓冲区读取(指定个数的)字符,如果指定个数num则至多读取num个字节,返回值是一个字节型数据列表
- readinto(buf) , 从串口接收缓冲区读取数据到buf中,buf必须是一个字节数组(bytearray),返回值是读取并储存在buf中的字节个数
- readline() , 从串口接收缓冲区读取数据,遇到换行符(0x0D)则停止读,返回值是一个字节型数据列表
- reset_input_buffer() , 清空串口接收缓冲区内,如果接收缓冲区是非空的,相当于丢弃已接收到的数据
- write(buf) , 发送字节数组(bytearray)buf中的数据,返回值是已发送的数据个数
注意,Python解释器中的“print()”函数并不属于UART类的接口,而是Python解释器自带的一种向字符控制台输出字符串的专用接口, BlueFi开源板Python解释器使用USB-串口桥接通道实现print()、REPL等接口。此外,UART子类还支持硬件流控信号(RTS和CTS), 以及RS485模式(支持发送和接收使能/传输方向控制信号)等,关于RS485通讯接口将在第7.4节介绍。
当我们了解这些软件的接口之后,再回头去看上面采用两种语言所编写的多个BlueFi玩“数字接龙游戏”代码,不仅容易理解,还会发现很多接口并未使用到。 上面的示例仅使用UART功能单元收发单个数字,即每次发送一个字节的数据,而实际的异步串口通讯应用中每次需要传输更多数据。譬如,为了测量一个密闭环境中的温湿度, 将一个BlueFi放置在密闭环境,另一个BlueFi放置在外面便于我们观察环境变化情况,我们可以使用3根信号线将两个开源板共地并将P0和P1交叉连接, 密闭环境内的BlueFi软件实施温湿度测量(参考第4.2节),然后将浮点型的温度和湿度数据传输给外部的BlueFi显示。异步串行通讯接口传输的数据是以字节为单位, 如何传输浮点数呢?至少有两种方案。其一是直接传输温度和湿度的原始二进制表示的数据,由于单精度浮点的是32位宽(即4个字节组成),即传输8个字节; 其二是先将浮点型的温度和湿度分别转换成字符串,然后再传输。很显然,两中传输方案的区别是所传输的数据的表示形式,以及数据流格式。数据流格式指的是, 数据流的那几个字节是温度数据,那些是湿度数据。传输数据的表示形式之间有稍许区别,原始二进制形式的数据流最短,字符形式的数据流的可读性很高。 事实上,温度和湿度数据的传输方案远不止这两种。但无论采用那种方案,两个BlueFi的软件设计工程师必须先约定好数据流中的数据表示形式和格式, 并按约定的方案编写发送、接收和解析数据的程序才能实现期望的任务。
通讯双方约定的数据流表示形式和格式等被统称为通讯协议(Protocol)。异步串行通讯接口协议包括,波特率、字节单元的格式(数据位个数、校验位、停止位个数等), 数据流固定的头字符(Head Character)、数据流校验字(Check Word)、终止符(Terminator),以及数据流的表示形式和格式。
异步串行通讯接口协议的架构示例请参考图7.11。
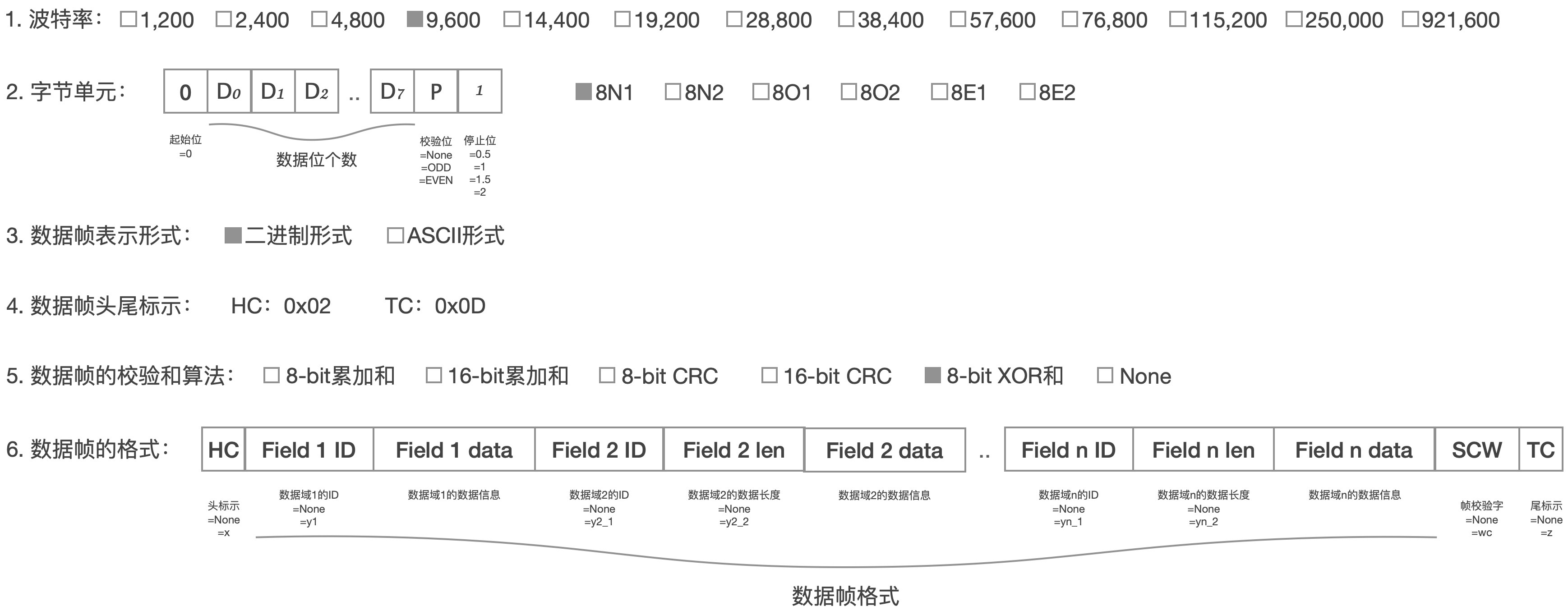
图7.11 异步串行通讯协议的架构
人与人之间的协议、合同等属于法律范畴的概念,通讯协议是计算机系统之间的软件接口规范,通讯双方的任一方不遵循约定的通讯协议就有可能会造成通讯失败。 上图所示的格式化数据流,也称作数据帧(Data Frame)。头字符和终止符是数据帧的同步字节,用于识别一个数据帧的起始位置和终止位置,一般来说这两个特殊字符是固定不变的。 一个数据帧内可能包含多种不同的数据域(Data Field)用于传输复杂的结构化信息。对于变长的数据域,除了必要的域ID之外,还应有数据域长度字, 接收者能够根据域ID、数据域长度(或字节数)等信息准确地确定该域的有效数据。
数据帧中的校验字,以及计算校验字的算法都属于异步串行通讯协议的一部分,接收者使用校验字来确定接收到的数据帧的准确性。
格式化的数据帧及其数据域的定义是所有通讯协议的关键规范,也是可靠地传输数据的基本保障。计算机系统联网使用的TCP/IP协议中包含多种复杂结构数据帧规范, 譬如HTTP、STMP、FTP、TCP和UDP等数据帧的定义,数据帧中的每一个位都有具体的意义(TCP/IP是一种面向位流的协议)才能实现全球计算机系统互联。
在图7.11中,同步位(起始位和停止位)、同步字符(头字符和终止符)等是异步串行通讯协议的关键结构信息,UART功能单元使用同步位信息保持同步收发单个字节, 串口软件则使用同步字符定位数据帧的头和尾。根据本节开始时的示例测试可以知道,仅使用2个信号线和共地线即可实现全双工通讯的异步串行接口在硬件连线、软件编程等方面都非常简单, 虽然随着波特率的增加数据传输发生错误的可能性越高,低波特率的数据传输可靠性还是非常高的。
目前,虽然各种高速的、大数据吞吐量的系统间通讯接口非常多,异步串行通讯接口仍在广泛使用,尤其在嵌入式系统开发和调试、系统固件下载、工业级通讯等领域, 应归功于异步串行通讯接口的简单易用、成本低和可靠性高等特点。
参考文献:
[1] https://www.arduino.cc/reference/en/language/functions/communication/serial/
[2]